Getting Started with the Turtle Simulator
Install Turtlesim
First, update your package list and install Turtlesim:
sudo apt update
sudo apt install ros-humble-turtlesim
Check that the package is installed:
ros2 pkg executables turtlesim

Start Turtlesim
To start Turtlesim, enter the following command in your terminal:
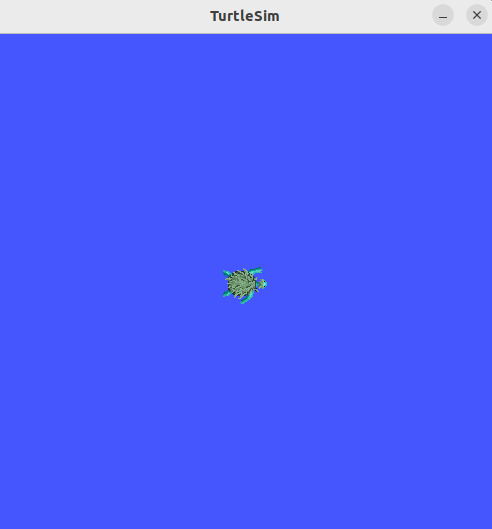
ros2 run turtlesim turtlesim_node
This will open the Turtlesim window where you can see the turtle.
Move the Turtle
Open a new terminal and source ROS 2 again. Then run the teleoperation node to control the turtle:
ros2 run turtlesim turtle_teleop_key
Using your keyboard, you can now control the turtle's movement.

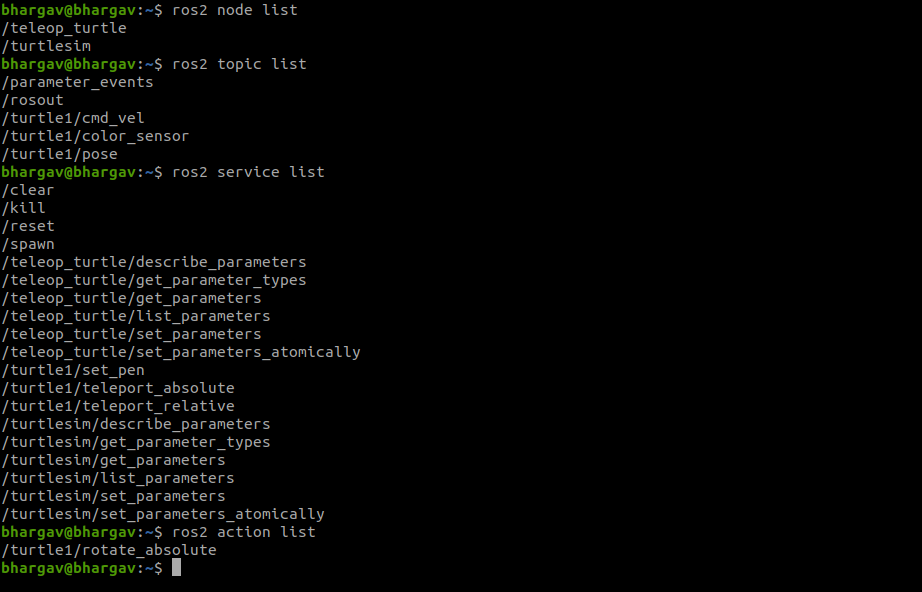
List Nodes, Topics, and Services
You can see the nodes, and their associated topics, services, and actions, using the list subcommands of the respective commands:
ros2 node list
ros2 topic list
ros2 service list
ros2 action list