Creating Launch File for Publisher and Subscriber node
Create a new package in the same workspace
cd ~/ros2mooc/src
ros2 pkg create creating_launch_file --build-type ament_python
Create a launch directory
Inside package creating_launch_file create a directory named launch:
mkdir -p ~/ros2_ws/src/creating_launch_file/launch
Copy python file from hello_world to this package
cp ~/ros2_ws/src/hello_world/hello_world/hello_world_node.py ~/ros2_ws/src/creating_launch_file/
Single Launch File
Create a new launch file named hello_world_launch.py inside the launch directory:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='creating_launch_file',
executable='hello_world_node',
output='screen',
),
])
Updated Directory Structure
Ensure your package has the following structure:
ros2mooc/
├──src/
└── hello_world/
└── task1/
└── task2/
└── creating_launch_file/
├── creating_launch_file/
│ ├── __init__.py
│ └── hello_world_node.py
├── resource/
├── test/
├── package.xml
├── setup.cfg
└── setup.py
setup.py
Ensure your setup.py includes both the publisher and subscriber nodes:
from setuptools import find_packages, setup
import os
from glob import glob
package_name = 'py_pubsub'
setup(
name=package_name,
version='0.0.0',
packages=find_packages(exclude=['test']),
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.py')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='bhargav',
maintainer_email='hsbhargav87@gmail.com',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'hello_world_node = creating_launch_file.hello_world_node:main'
],
},
)
Building and Running
-
Build the Package
-
Source the Workspace
-
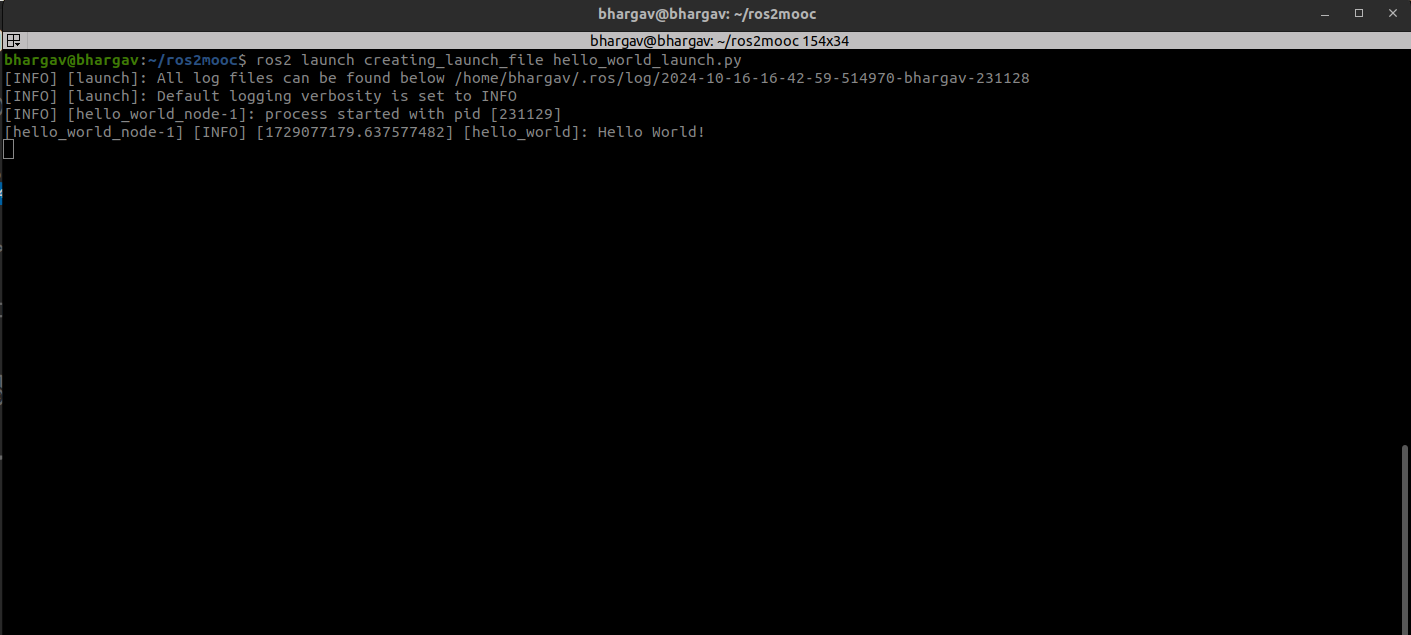
Launch Node:
ros2 launch creating_launch_file hello_world_launch.py
Output