
Robotic Manipulators / Robotic Arms
- These are robots designed to manipulate the environment around them.
- These are commonly referred to as Robotic Arms.
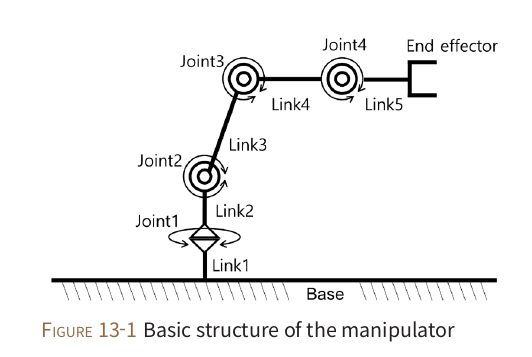
Image from ROS Robot Programming Book
-
This is a typical structure of a manipulator. A manipulator consists of Joints, Links, an End effector, and a base.
-
Joints: These are the movable components of a robotic arm. Joints allow the movement of links. Actuators like motors allow the movement of joints.
-
Links: These are rigid structures used to connect joints. Movement of links is possible with joints only.
-
End-Effector: In serial robotic manipulators, the end effector means the last link of the robot. An end effector is a device at the end of a robotic arm, designed to interact with the environment. For example, the mechanism gives the gripping capability to a robotic arm.
-
Base: It is a plane to which a robotic arm is connected.
-
-
A robotic arm is very similar to a human arm.
- Your elbow and wrist are similar to joints.
- Your forearm is like a link that connects two joints i.e your elbow and wrist.
- Your palm and fingers are the end-effectors.
- Your torso is the base for your arm.
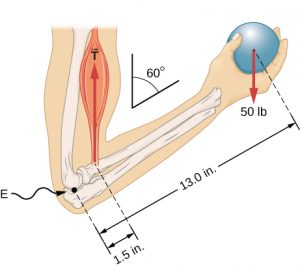
Image from Open Oregon
Reading Assignment
- Chapter-13, Manipulators, ROS Robot Programming Book [Section 2.1]
Kinematics
- It is a branch of mathematics that deals with the motion of a body or system of bodies.
- It describes the motion of points, bodies, or systems of bodies without looking into forces that cause them to move.
- Before diving deep let's look at why we need kinematics in the first place?
Why Kinematics?
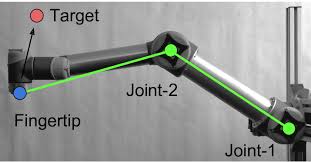
Image from Researchgate
- Suppose you have a robotic arm and you want to pick a box using this arm.
- You know the position of the box in Cartesian space i.e you know the x, y, and z of the box in space.
- Now in order to pick this box you need the end-effector of your robotic arm to go near the box and then pick it.
- To make this possible you need to actuate the joints of your robotic arm in such a way that the end-effector is able to reach the box.
- Now, how much do you need to actuate each joint for this? This is an Inverse Kinematics problem.
- Given the position of the end-effector in Cartesian space you can calculate the angle of rotation for each joint using Inverse Kinematics.
- If you have joint angles and you need to calculate the position of your end-effector in Cartesian space you can calculate that using Forward Kinematics.

Image from Researchgate