
IMPORTANT: Since we are done building the map, Just comment or remove it from
ebot_bringup_launch.py:ld.add_action(declare_mapper_online_async_param_cmd) ld.add_action(mapper_online_async_param_launch)It uses SLAM
1. Setting up EKF:
Check robot_localization installation, To Know more
ros2 pkg list | grep robot_localization
- You should get
robot_localizationas output, which means we are good to go. - If not, install
robot_localizationusing,
sudo apt install ros-humble-robot-localization
Update EKF parameters in robot_localization dir at /ebot_nav2/config/ekf.yaml,
map_frame: map # map frame define
odom_frame: odom # odom frame define
base_link_frame: ebot_base_link # our ebot_base_link is the base frame
world_frame: odom # Defaults to the value of odom_frame if unspecified
odom0: /odom_topic # odom topic here
odom0_config: [true, true, true, # To know more about it read ekf.yaml
false, false, false,
true, true, true,
false, false, true,
false, false, false]
imu0: /imu_topic # imu topic here
imu0_config: [false, false, false, # To know more about it read ekf.yaml
true, true, true,
false, false, false,
false, false, false,
false, false, false]
Adding the robot_localization node in the ebot_bringup_launch.py launch file in dir /ebot_nav2/launch/, it's already added in launch file.
robot_localization_node = Node(
package='robot_localization',
executable='ekf_node',
name='ekf_filter_node',
output='screen',
parameters=[os.path.join(ebot_nav2_dir, 'config/ekf.yaml'), {'use_sim_time': use_sim_time}] ##Loads the ekf.yaml file
)
Just add this as the object of LaunchDescription() in the same launch file, in the last
ld.add_action(robot_localization_node)
- Just save it
2. Setting up AMCL:
Nav2 in built has amcl, just need to update the ros_params in nav2_params.yaml in dir /ebot_nav2/params/
amcl:
ros__parameters:
use_sim_time: True
alpha1: 0.00005 ## alpha's are related to odom model tuning, refer Nav2 Docs
alpha2: 0.00005
alpha3: 0.00005
alpha4: 0.00005
alpha5: 0.00005
base_frame_id: "base_footprint" #
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 5000
min_particles: 300
odom_frame_id: "odom"
pf_err: 0.01
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "nav2_amcl::DifferentialMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 0.5
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
map_topic: map
set_initial_pose: True
always_reset_initial_pose: False
first_map_only: False
initial_pose:
x: 0.0
y: 0.0
z: 0.0
yaw: 0.0
amcl_map_client:
ros__parameters:
use_sim_time: True
amcl_rclcpp_node:
ros__parameters:
use_sim_time: True
Just add this as the object of LaunchDescription() in ebot_bringup_launch.py launch file in dir /ebot_nav2/launch/. Add it in the last
ld.add_action(bringup_cmd_group)
-
Just save it
-
To know more refer here
3. Check Localization:
Almost everything is set, now just check your localization
- Start Gazebo enviroment:
ros2 launch ebot_description ebot_gazebo_launch.py
- Start Nav2 Bringup:
ros2 launch ebot_nav2 ebot_bringup_launch.py
- Start teleop_twist_keyboard:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
- Rviz will look like this,
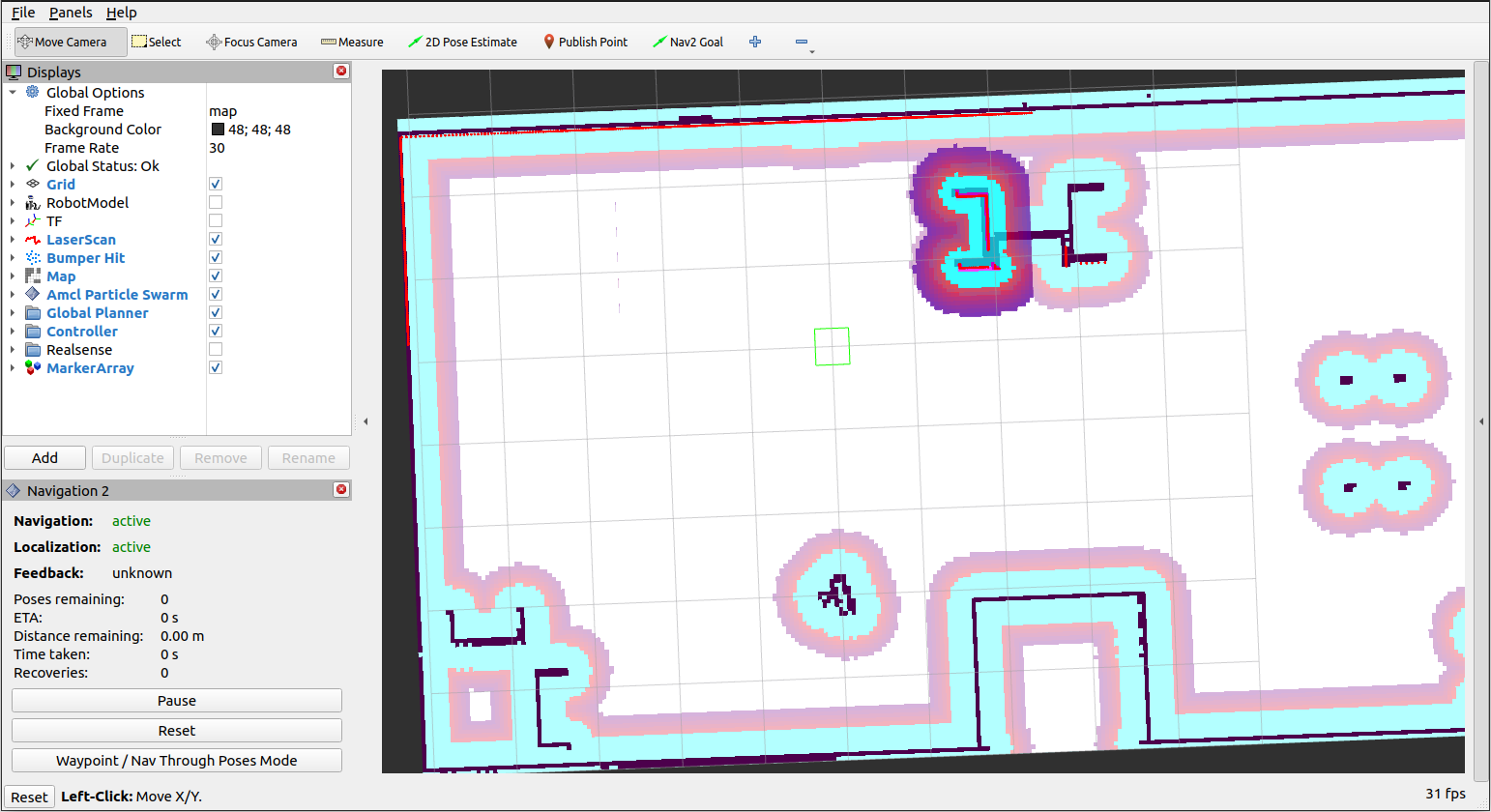
Move the ebot using teleop and it should localize well, if not try to tune the AMCL params