Mapping
-
A map is a representation of the environment where the robot is operating. It should contain enough information to accomplish a task of interest.
-
There are different ways to represent a map
- Metric
- Feature based
- Grid based
- Hybrid
- Topological
- Hybrid
- Metric
-
In order to create a map it is necessary to merge the measurements from previous positions and also keep a track of current measurements and the pose of the bot as they are changing.
-
To overcome this problem we use a technique called Simultaneous Localization and Mapping(SLAM). It estimates the map of the environment and the trajectory of a moving device using a sequence of sensor measurements.
-
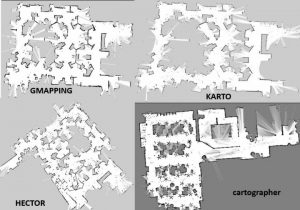
There are a lot of SLAM algorithms around. To name a few, Gmapping, Hector mapping, Cartogrpaher, Rtab mapping etc. Here is a little comparison,
Here is an example of mapping using slam-toolbox by nav2 stack, we will be learning to do it in the next section: